Project Aura
Transforming the relationship between cyclists and drivers.
Our Goal
Bridging the communication gap between drivers and cyclists.
In 2011, a friend of mine, Ethan Frier and I had an idea. As bike commuters in Pittsburgh, Pennsylvania, we recognized a critical gap in cycling safety lighting: communication. This simple insight sparked a six year journey to redefine how cyclists and drivers can better coexist in the modern city.
SECTION 01
Despite modern cycling advocacy movements, cycling in the city still inspires anxiety.
Potholes, Muni tracks, distracted ride share drivers and pedestrians. These anxieties heightened by the darkness of night transform them into very real dangers.
818
Deaths in 2015
Pedestrian and Bicyclist crash statistics
In 2015, 818 people lost their lives in bicycle/motor vehicle crashes
More than two people every day of the year in the U.S. This represents a 6 percent increase in bicyclist fatalities since 2006 and a 12.2 percent increase from the previous year (2014).
~1/3
Of all Injuries caused by cars
2012 National Survey on Bicyclist and Pedestrian Attitudes and Behaviors
Nearly a third of all injuries are caused when bicyclists are struck by cars.
7/10
People
San Francisco Statistics
7/10 people state safety concerns as a major impact on their decision to bike.
55%
People
San Francisco Statistics
55% don’t feel safe while riding their bike near traffic
Emerging Challenges
Self driving cars pose another threat
Bikes pose a complex detection problem because they are relatively small, fast and heterogenous. “A car is basically a big block of stuff. A bicycle has much less mass and also there can be more variation in appearance — there are more shapes and colors and people hang stuff on them.”
Bicycles are probably the most difficult detection problem that autonomous vehicle systems face.
- Steven Shladover, UC Berkeley research engineer
SECTION 02
Safety isn’t a one sided endeavor.
In order to understand how to make cyclists safer, we had to understand drivers.
Driver Research
Understanding the driver
I conducted a few “ride-alongs” with friends, driving a pre-planned route around the city that took them through mixed areas of pre-identified bicycling activity: marked bike lanes, protected bike lanes, shared lanes.
Driver Research
The emergence of “critical moments”
Drivers and cyclists generally don’t care about each other until something is about to happen. Both only care about moments where a decision needs to be made based on the available information.



As long as [the cyclist] is in their own space, I don't care about them.
- Frankie Gaw, Car Driver
Key Insight
Cycling safety experts agree.
For cyclists riding in traffic, experts emphasize riding predictably as a key safety behavior. By riding predictably, cyclists communicate their intentions and the information drivers need to safely operate their vehicle near cyclists.
Rider Research
What critical moments mean for cyclists and drivers.
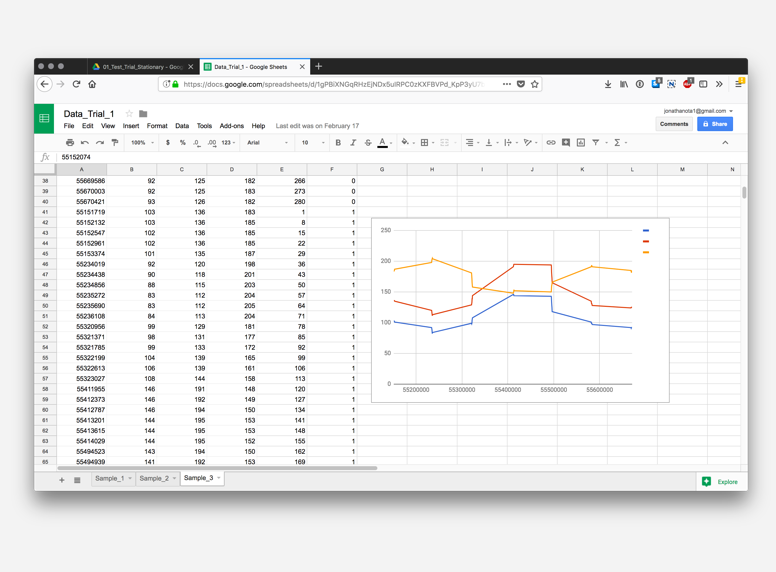
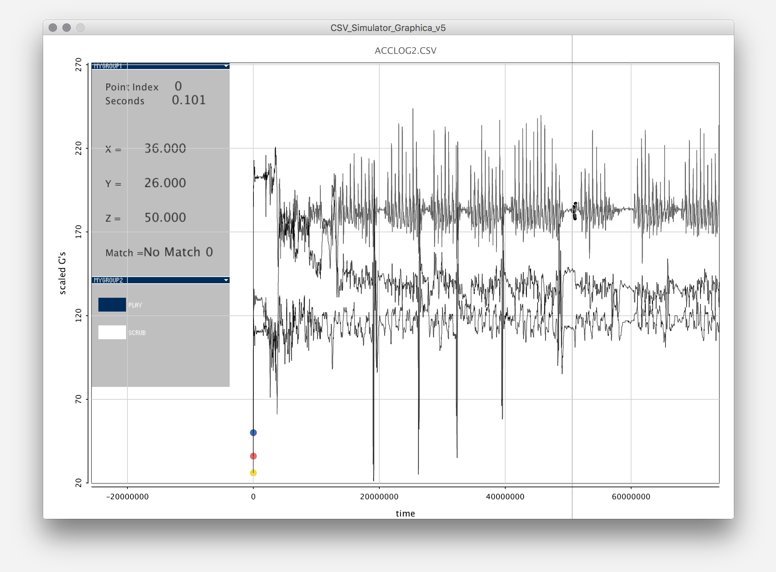
Therefore, I began recording my rides to and from work in order to uncover and categorize the types of “critical moments”. By detecting these “critical moments”, we could enhance the safety of the rider.




Rider Research
In some of these moments, cyclists used body gestures to indicate their intention.
Drivers can use these gestures, when available, to predict whether or not a critical moment is about to happen and then quickly take the most appropriate action for the situation.
Key Insight
Most of the time, cyclists failed to communicate their intention before they made an action.
Hand signalling was rare as most cyclists were concentrating on the complexities of weaving through dense traffic and avoiding obstacles and moving pedestrians.
SECTION 03
Our opportunity: Enhance cyclists’ intentions to be better understood.
Existing Analogs
An analog already exists: car lighting.
Car drivers rely on a set of lighting paradigms to communicate between each other: turn signals, brake lighting, etc. By utilizing a similar language we enable drivers to better understand a cyclist’s intentions.

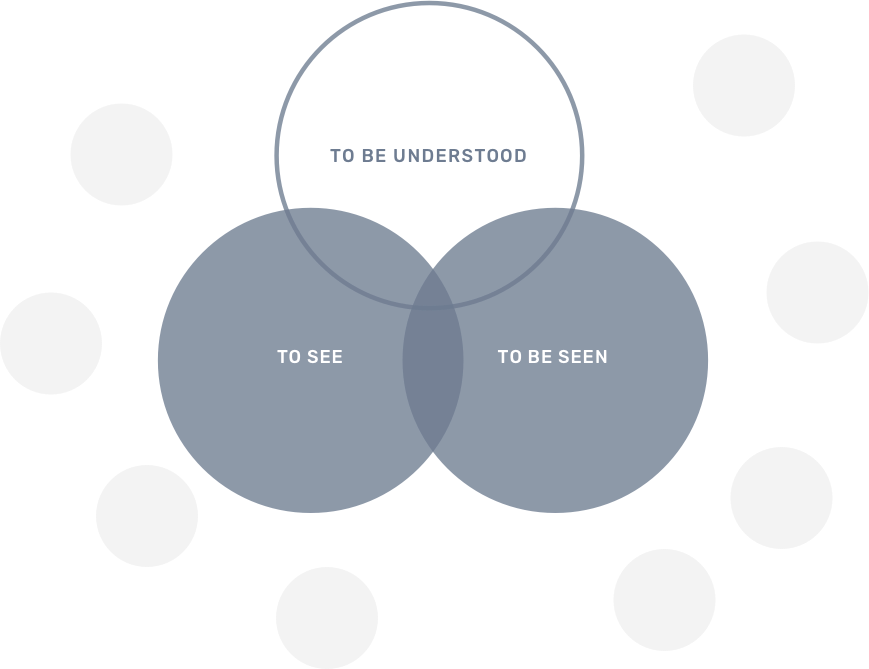
Market Opportunity
Currently, there is a gap in the market.
Currently, there are two types of lights on the market: lights to be seen and to see. Both types of lights focus on the challenge of visibility. There are very few lights that address the challenge of communicating intentions. The few that are available are either low quality products from overseas or products that are distracting to use: requiring a user to press a button on the handlebar to activate.
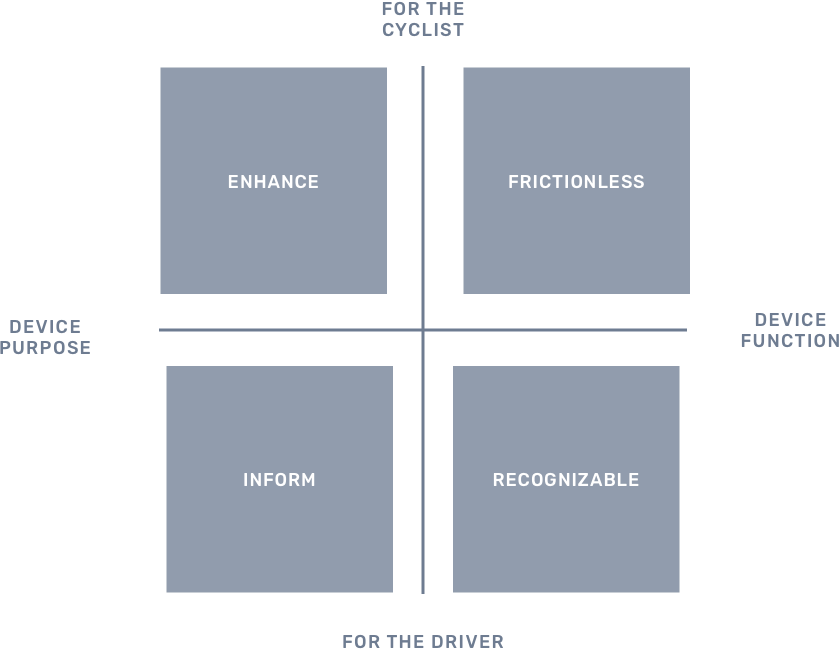
Solution Criteria
The solution needs to perform for both the cyclist and the driver through these four design criteria.
Enhance: the solution must enhance a cyclist’s current ability to communicate. Inform: it must inform drivers of a safer course of action while driving around cyclists. Recognizable: the solution must build off communication paradigms drivers are already familiar with. Frictionless: the experience of using the product should build off the existing behaviors of the cyclist using limited equipment
SECTION 04
Turning insight into action
Through the process of prototyping, I sought to better understand the feasibility and desirability of the insight.
Technology
Choosing the right technology.
Understanding rider gestures already created a list of constraints: user wearable, low power, wireless communication. At the time, Intel Curie proved to be the most promising as it was designed for this very purpose: Arduino compatible for easy development, 3.3v low power, Nordic NRF51822 BLE SoC, 6 Axis IMU, Pattern matching engine with hardware accelerated KNN and RBF machine learning algorithms
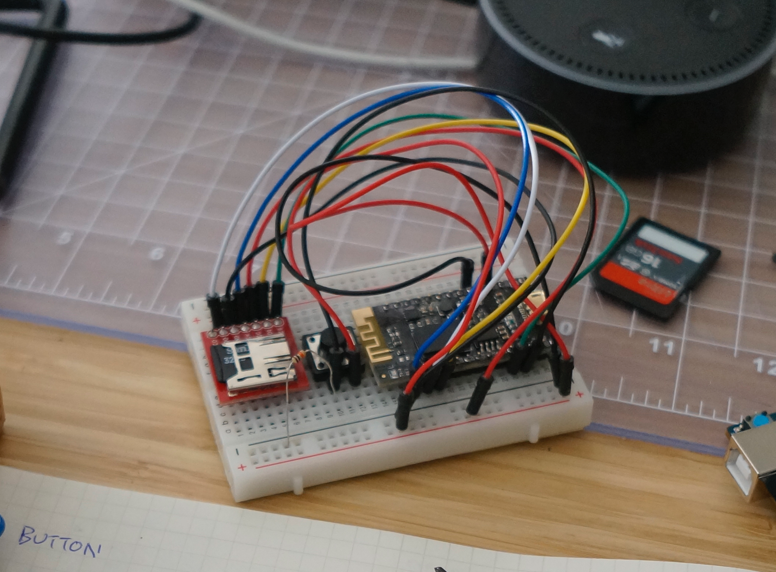
Prototyping
Fake, cheat and steal (only when prototyping).
Prototyping basically means hacking existing products until they fit your needs. Fortunately for me, the Arduino community provided fantastic documentation and a number of algorithms I repurposed for my needs. There are also bluetooth enabled bike lights on the market I was able to hack by simply sending ASCII char’s over Nordic’s Serial BLE profile.

Iteration 01
Headturns as gestures
For the first prototype, I pursued an early hypothesis that the position of a rider’s head can give 75% of the gesture information I need. My goal was to connect the Curie to the See.sense lights and trigger them based on a head turn threshold.



Iteration 02
Improving recognition accuracy
For the second prototype, I sought to improve accuracy, utilizing the onboard pattern matching engine of the Curie. This meant developing a training protocol for the RBF kernel.

Where the Work is Now
Curie EOL
Gotta find a new module!